这篇文章主要通过一些示例为大家详细介绍一下C语言中的线程信号控制,文中的示例代码讲解详细,对我们深入了解C语言有一定的帮助,感兴趣的可以学习一下
一、场景介绍
存在三个线程,一个主线程和两个子线程(子线程数量不固定)。为了节省频繁创建销毁线程造成的资源浪费,将这些线程设置为常驻线程。但这样引入了一个新的问题,如何协调这些线程完成工作。
主线程内是循环检测某个文件夹内文件的变动,当文件夹内出现新的文件时,更新可拷贝文件列表,并告知子线程开始干活;子线程拷贝结束后需要告知主线程任务完成了,主线程开始下一轮检测。
二、解决方法
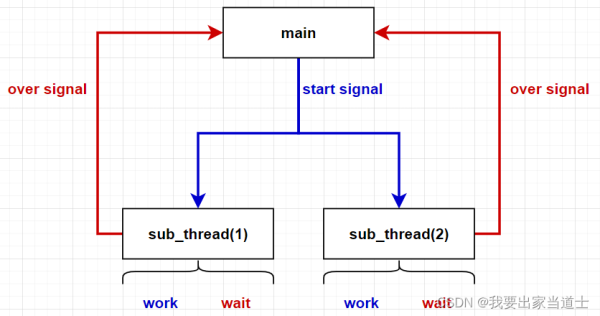
1、临时线程
主线程每次检测完毕后,新建子线程执行拷贝任务,并阻塞等待线程任务的结束。
#include "main.h" void *filecopy_thread(void *args) { pthread_t id = pthread_self(); PTHREAD_ARGS *thread_args = (PTHREAD_ARGS *)args; string dst_dir = thread_args->dst_dir; while (1) { // get the file to copy pthread_mutex_lock(thread_args->mutex); // exit when the list is empty if (thread_args->file_list.empty()) { pthread_mutex_unlock(thread_args->mutex); break; } string src_file = thread_args->file_list.back(); thread_args->file_list.pop_back(); pthread_mutex_unlock(thread_args->mutex); copy_file(src_file, dst_dir); } return NULL; } int main(int argc, char **argv) { while(1) { bool is_switch = oracle.is_redolog_switch(); // judge whether the redolog has bean switched if ( is_switch ) { printf("pthread create\n"); pthread_t *pthread_list = (pthread_t *)malloc(sizeof(pthread_t) * cfg_utils.m_filecopy_pcount); if (!pthread_list) { LOG_F(ERROR, "pthread list created failed"); continue; } pthread_mutex_t mutex; pthread_mutex_init(&mutex, NULL); PTHREAD_ARGS pthread_args = {file_list_src, &mutex, cfg_utils.m_logbk_syspath, &oncebk_count}; struct timeval start, end; gettimeofday(&start, NULL); // start file copy thread for (int i = 0; i (1)优点
逻辑简单
(2)缺点
频繁创建与销毁线程,资源浪费。
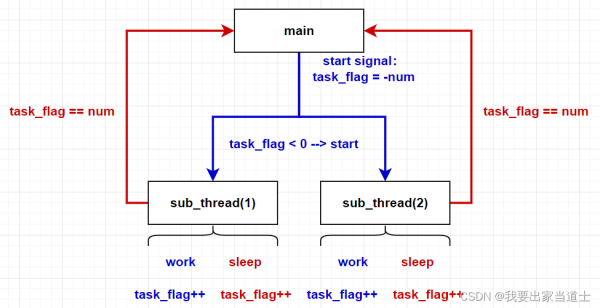
2、全局变量信号
定义一个全局变量作为线程的控制信号。
主线程将该信号设置为子线程的个数的负数,以启动子线程。
当该信号小于 0 时,子线程开始启动。子线程的启动与任务完毕都需要将该信号加一。
当主线程检测到该信号为线程总数时推导子线程本次任务结束。
(1)优点
子线程作为常驻线程,节省了一定的资源。
(2)缺点
子线程与主线程在等待信号的过程中要么造成 CPU 的空转,要么 sleep 会增加程序的处理时延。
而且,子线程启动与结束都对全局信号进行加一的操作,极端情况(某些线程执行速度存在极端差异)下可能造成信号控制的紊乱。
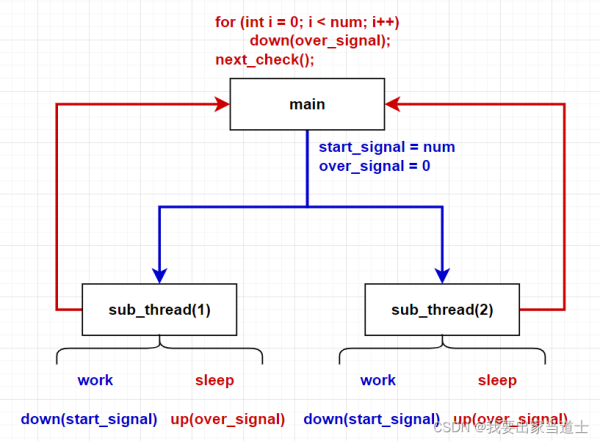
3、信号量
使用两组信号:start_signal 和 over_signal。
主线程启动子线程时,需要将 start_signal 赋值为子线程数,over_signal 赋值为0.
子线程执行down(start_signal) ,该操作执行成功即可执行任务逻辑,执行完后 up(over_signal)。
主线程需要执行 num 次down(over_signal)操作,只有所有子线程执行结束,该操作才可以执行完成。
在等待执行信号down和up的过程中,线程都是阻塞的,不会造成 CPU 的空转,当信号可操作时也会立即执行,不会增加操作时延。
到此这篇关于C语言中的线程信号控制详解的文章就介绍到这了,更多相关C语言线程信号控制内容请搜索0133技术站以前的文章或继续浏览下面的相关文章希望大家以后多多支持0133技术站!
以上就是C语言中的线程信号控制详解的详细内容,更多请关注0133技术站其它相关文章!






